MotoGP à Lupa, 2020: 8 – Inércia e forças giroscópicas

Outro fator invisível e no entanto muito importante, hoje conhecemos mais das forças inerciais e giroscópicas que afetam uma moto de MotoGP em movimento, graças à eletrónica e recolha de dados
As forças inerciais afetam todo o percurso de uma moto de MotoGP ao longo de uma volta em pista

Nas nossas crónicas anteriores temos aludido frequentemente às forças giroscópicas, mas o que são elas exatamente, e como afetam uma máquina de MotoGP?
A inércia é definida como a propriedade que os corpos têm de não poderem, por si, alterar o seu estado de repouso ou o seu movimento e é uma força igual e de sentido oposto ao produto da massa pela aceleração. Segue que, uma vez um corpo em movimento, tem tendência para continuar esse movimento até que algo o contrarie.
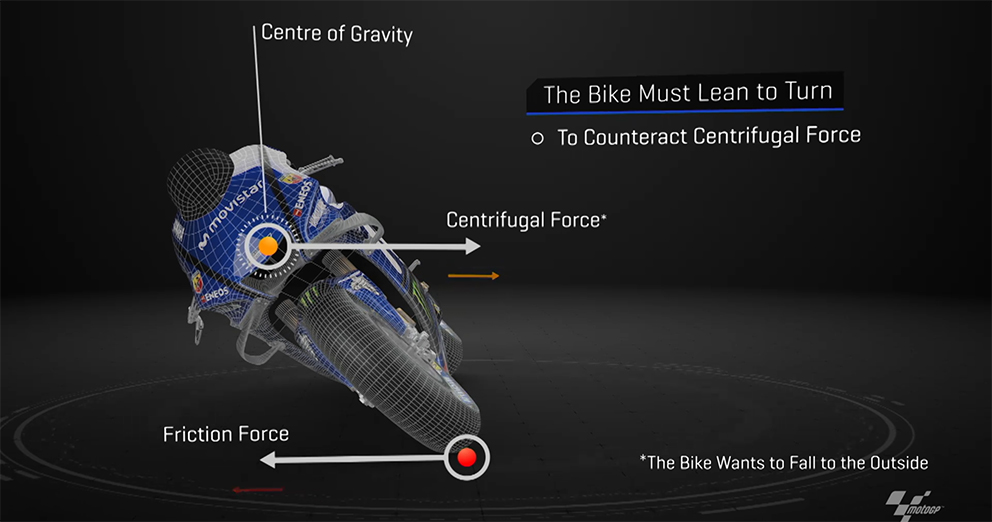
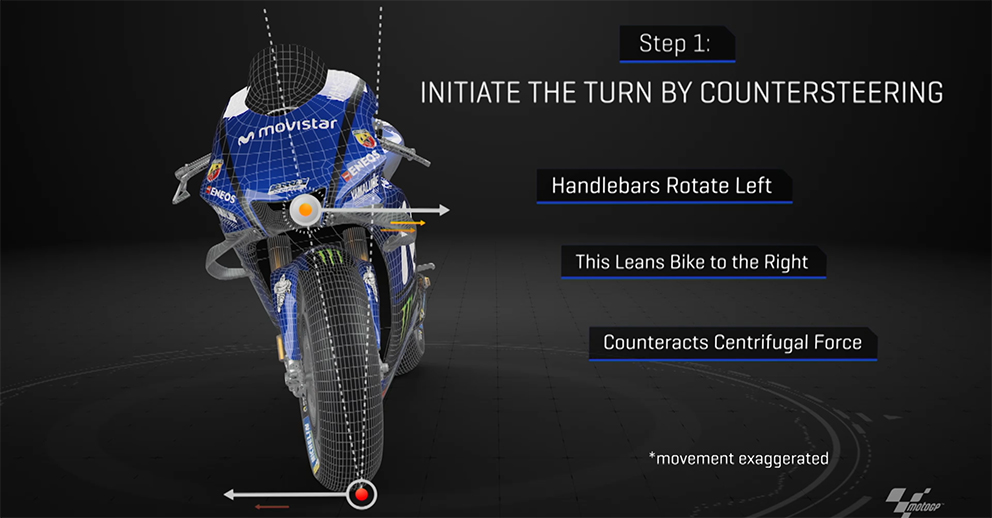
As forças inerciais afetam todo o percurso de uma moto de MotoGP ao longo de uma volta na pista: Para vcurvar, tem de contrariar a inércia, euqalizando através da aderência dos pneus as forças centrífugas que a veriam sair de linha. Por outro lado, quando a moto vai à velocidade máxima, há grande resistência à perda de velocidade, que tem de ser contrariada pelas forças de travagem. Quando está parada, resiste à aceleração, tanto mais quanto mais pesada for.
Para lá da força da massa combinada do peso da moto e piloto, a bombarem a grandes velocidades em pista, componentes rotativos de uma moto como as rodas ou a cambota afetam, com o seu peso, a massa inercial, contrariando qualquer tentativa de mudar de direção.
Para uma boa analogia, imaginem agarrar uma roda de bicicleta com os braços estendidos à vossa frente e fazer outra pessoa girar essa roda.
Quando a roda está a girar a uma boa velocidade, mesmo esse peso irrisório é difícil de virar, pois as forças giroscópicas da roda contrariam a tendência.
Isto também torna fácil andar de bicicleta depressa sem mãos, mas muito mais difícil se estivermos a andar muito devagar. A causa são as forças giroscópicas, que utilizam a inércia de um corpo em rotação para obter estabilidade.
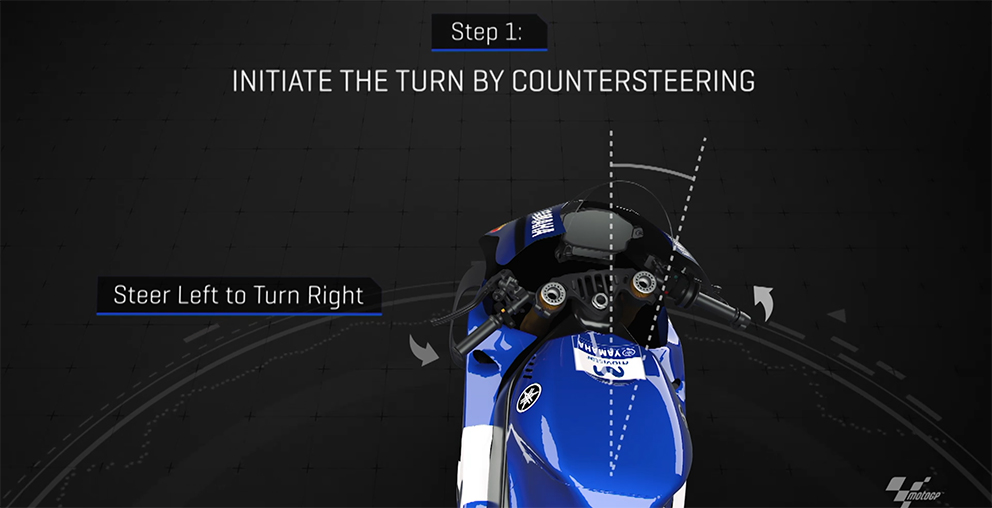
O problema é que essa estabilidade também contraria a necessidade de mudar de direcção rapidamente ao inserir a moto em curva, repetidamente a cada volta de um circuito, quando as forças giróscopicas estão afetar o movimento. Assim, o piloto tem de puxar a moto para a curva, puxando os avanços na direção oposta à da curva para contraria a força giroscópica que tenderia a fazer a moto seguir em frente.

Essa força giroscópica é menor, quanto menor for a massa do objeto em rotação, daí a necessidade de aligeirar cambotas e rodas o mais possível.
Há muitos anos, as motos inglesas de estrada tinham notórias qualidades de comportamento em curva, em grande medida, por causa das suas grandes rodas de 19 polegadas, com pesados aros de aço, raios e tudo o mais, que carregavam um grande força giroscópica nas curvas dando estabilidade à moto, mas ao mesmo tempo tornando-a pesadona ao curvar.
Numa moto de MotoGP queremos exatamente o oposto, que a moto, mesmo perdendo alguma estabilidade em reta, acelere o mais depressa possível, seja ágil nas mudanças de direção, e ganhe velocidade rapidamente à medida que o motor ganha rotação.
Em suma, queremos minimizar as forças giroscópicas e, portanto, reduzir o peso que lhes dá origem é útil, se não mesmo essencial.
Se as forças giroscópicas ajudam à estabilidade de uma moto, ao mesmo tempo tendem a querer manter a direção escolhida e opor-se a mudanças de direção, quanto mais as rápidas e repentinas como as utilizadas para negociar uma chicane a alta velocidade, por exemplo.
Ainda por cima se a rotação da cambota ajudasse a rotação das rodas, indo na mesma direcção, o efeito vem-se complicar ainda mais, e os pilotos queixavam-se de motos muito difíceis de virar e inserir em curva e, geralmente, de efetuar mudanças de direção.
Assim, em muitas motos de MotoGP, todas na grelha atual, aliás, a cambota começou a ser rodada na direção oposta à das rodas, o que até certo ponto fazia as forças giroscópicas anularem-se mutuamente, embora a das duas rodas fosse sempre maior.
O problema é que, com o motor girando no sentido contrário, para a moto depois não andar para trás, isso envolve a utilização de um veio adicional no motor para voltar a inverter a direção do movimento.
Com recurso aos atuais modelos de computador, as forças giroscópicas podem ser calculadas quase automaticamente.
À medida que uma nova configuração do motor é projectada, os cálculos das forças existentes e do seu efeito no todo são realizados, e portanto isso é um dos fatores que os projetistas tem que ter em conta ao desenhar configurações de motores.
Claramente, neste aspeto, um V4, como os da Aprilia, Honda, KTM ou Ducati, está em vantagem, porque a cambota é muito mais estreita, ao conter duas bielas em cada olhal, enquanto um 4 em linha, como os da Yamaha ou Suzuki, têm uma cambota muito mais larga, que vai criar efeito giroscópios muito mais pronunciados.
Até há uns anos atrás este efeito era quase impossível de medir e podia ser apenas adivinhado com uma avaliação estimativa por parte de técnicos muito experientes.
Hoje em dia, a telemetria com os seus sensores e eletrónica, permite medir todas estas forças, e no fundo, equilibra-las mais facilmente entre si.
O objetivo é sempre o mesmo, permitir ao piloto andar cada vez mais depressa, com maior sensação, negociando as curvas e retas da pista o mais depressa possível a cada volta.
A evolução não para!

-
 MotoGP: Valentino Rossi irá cumprir o seu terceiro ano ao serviço da BMW23 Dezembro 2024 09:41
MotoGP: Valentino Rossi irá cumprir o seu terceiro ano ao serviço da BMW23 Dezembro 2024 09:41 -
 MotoGP, Alex Rins: “O motor V4 não estava pronto no teste de Jerez”22 Dezembro 2024 21:49
MotoGP, Alex Rins: “O motor V4 não estava pronto no teste de Jerez”22 Dezembro 2024 21:49 -

-
